18/5 - تعادل بر دو پا: سختتر از آنچه که فکر میکنید
تعادل برای بیشتر ما، چیزی نیست که بخوایم بهش فکر کنیم. حفظِ قامتِ عمودی برای انسانها در واقع چالشی قابل توجه ه، اما سیستم عصبی-عضلانی ما برای این کار حسابی سازگار شده. با این حال، هنگامی که حفظِ تعادل به خطر میافتد، مردم بیشتر خطرِ افتادن و آسیب های بعدی رو دارن.
بیومکانیک پایهای حالت ایستاده، به صورت گرافیکی در شکل ۳-۱۸ آمده است. انسانی که عمودی ایستاده است، بی حرکت نیست. از آنجا که مرکز گرانش بدن انسان در ارتفاع حدود سطح کمر (برای اطلاعات بیشتر در مورد مرکز گرانش، به فصل ۸ مراجعه کنید) قرار دارد، انسان عمودی، به جلو و عقب تاب میخوره، به دور محوری که از مفصل مچش میگذره (که در شکل، با نماد ∘ نشان داده شده است) میچرخد. تاب خوردن، یک نوع سرعت زاویهای است (که در فصل ۹ توضیح داده شده است) و در شکل، با نماد ω و پیکانی که جهت تاب خوردن را نشان میدهد مشخص شده.
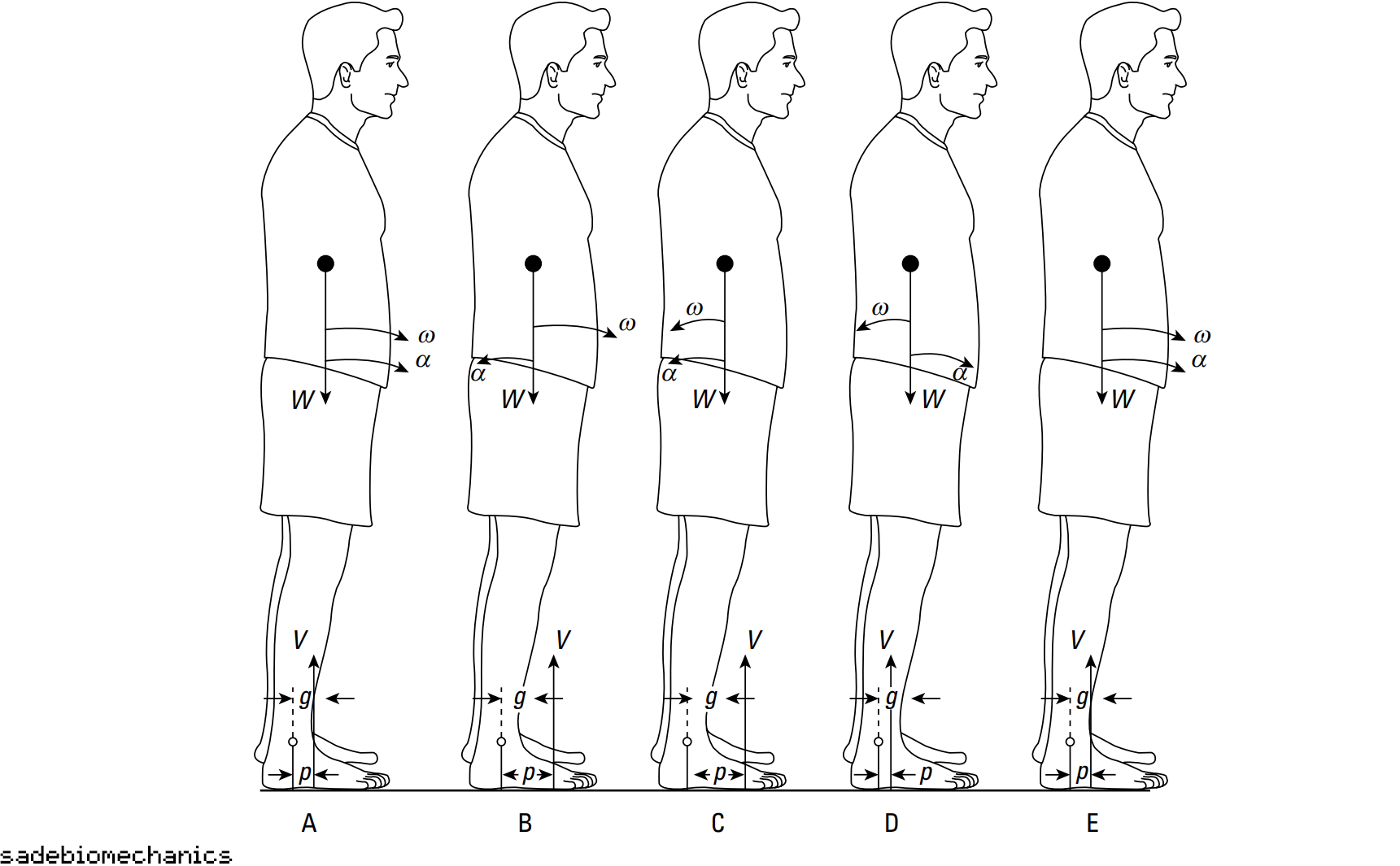
| شکل ۳-۱۸: بیومکانیک ایستادن ایستاده |
مقدار گشتاورِ ایجاد شده توسط هر نیرو، حاصلضرب نیرو و بازوی گشتاور (Moment Arm - MA)، یا فاصله عمودی از خط عمل نیرو تا مفصل مچ ه. در شکل ۳-۱۸، بازوی گشتاور برای W به عنوان g شناخته میشه، و بازوی گشتاور برای V به عنوان p شناخته میشن. هر چه فاصله از محور چرخش بیشتر باشد، گشتاورِ بیشتری ایجاد میشود.
گشتاور خالص بر روی فرد، تفاوتِ بین گشتاور رو به جلوی ایجاد شده توسط Wg و گشتاور رو به عقب ایجاد شده توسط Vp است. چون W و V در مقدار، برابر هستند، اندازه نسبی g و p، مقدار گشتاور خالص را تعیین میکند. گشتاور خالص، یک شتاب زاویهای رو برای فرد ایجاد میکنه، که در شکل با نماد α و یک پیکان، که جهت شتاب را نشان میدهد، مشخص شده.
در اینجا توضیحاتی در مورد قسمتهای A تا E شکل ۳-۱۸ آورده شده است:
- A: در نقطه شروع، فرد به طرف جلو متمایل است. مرکز گرانش، جلوتر از مرکز فشار ه، که باعث ایجاد یک الفا برای فردِ در حال تاب به سمت جلو میشود. برای متوقف کردن تاب خوردن به سمت جلو، فرد، عضلات پشت مچ را فعال میکند تا مرکز فشار را به سمت جلو و در مسیر پا فشار دهد.
- B: عضلات فعال شده، باعث جلوتر رفتن مرکز فشار از مرکز گرانش شده است، که باعث ایجاد یک الفا به عقب و کاهش ω جلویی میشود.
- C: الفا رو به عقب، باعث متوقف شدن تاب خوردنِ رو به جلوی فرد، و حالا، عقب رفتن او میشه. زمانی که تاب خوردنِ رو به عقب تشخیص داده میشه، فعالیتِ عضلاتِ پشت مچ کاهش مییابد و مرکز فشار، شروع به حرکت به عقب و در مسیر پا کنن.
- D: دوباره مرکز گرانش جلوتر از مرکز فشار است، که باعث ایجاد یک الفای به سمت جلویِ فردِ در حال تاب خوردن به عقب میشه. این باعث متوقف شدن تاب خوردن رو به عقب و برگشت آن به تاب خوردگی رو به جلو میشود.
- E: این مثل قسمت A است.
تعادل، تکرارِ توالی A تا E است. گیرندههای حسیِ سیستم عصبی مرکزی باید قادر باشند تا تاب خوردگی را شناسایی کنند و فعالسازی و غیرفعالسازی عضلات را برای کنترل شتاب زاویهای هماهنگ کنند. عضلات باید قادر باشند کشش لازم را روی پا ایجاد کنند تا مرکز فشار را به جلو ببرند و حرکت جلویی را متوقف کنند. هر گونه بیماری یا آسیب به سیستم عصبی عضلانی استخوانی میتواند بر کنترلِ تعادل تأثیر بگذارد.
با استفاده از پلتفرم نیرو، مکانِ مرکزِ فشار رو میشه شناسایی و ثبت کرد. ردیابی حرکتِ مرکز فشار زیر پا، استابیلوگرام (stabilogram) نام داره و تجزیه و تحلیل استابیلوگرام نشان میدهد که چگونه یک فرد، تعادل را کنترل میکند.
یکی از استفادههای استابیلوگرام، ارزیابیِ کارایی فرشهای اسفنجی استفاده شده توسط افرادی است که برای مدت طولانی در ایستگاههای کاری ایستادهاند، مانند صندوقداران، کارگران خط تولید و کارکنان آشپزخانه. این کارگران تمایل دارند، به دلیل جمع شدن خون در رگهای پاها، درد مچ پا و پا داشته باشند. بازگرداندن خون به قلب، بستگی به عضلاتِ فعالی دارد که به پمپ کردن خون در رگها به سمت بالا در برابر گرانش، کمک میکنند. استابیلوگرام تأیید کرد که استفاده از فرش فومی معمولاً، به طور کمی، تعادل کارگز ایستاده رو کم میکنه و باعث بیشتر کردن تاب خوردن به جلو میشود. ترکیب الکترومیوگرافی (EMG؛ فصل ۱۷ رو ببینید) با استابیلوگرام، تأیید کرد که فعالیت عضلانی بیشتر در عضلات پا باعث بیشتر شدن تاب خوردن میشود. این مهمه که مقدار فومینگ به اندازه ای باشه تا تاب خوردن را به حدی افزایش بده که نیاز به فعالیت عضلات بیشتری داشته باشد، اما نه به اندازهای ناپایداری ایجاد کنه منجر به خستگی زودتر بشه.
