16/3 - عیب یابی اجرا
عیب یابی همش در مورد مشخص کردن منبع اجرای غیر رضایتبخش ه. سطح اجرا میتونه به خاطر محدودیت ها یا خطاهای تکنیکی، کمتر از رضایت باشه. بهبود اجرا و رضایتمندی از اجرا زمانی رخ میده که محدودیتها و خطاهای تکنیکی برطرف بشن. این بخش رو با توضیح محدودیت ها شروع میکنم و بعدش به سمت خطاهای تکنیکی میرم.
محدودیت ها روی اجرا
یه محدودیت چیزیه که سطح اجرا رو محدود میکنه. محدودیت های ممکنه از سه منبع بیان:
کار: محدودیت های کار، خاص حرکت اجرا شده هستن. محدودیت کار ابتدایی، هدف استراتژیک کاره، اما محدودیت های کار همچنین شامل قوانینی که مشخصه میکنه چگونه و با چی، یه حرکت باید انجام بشه، هم میشن. مثلا، در بیسبال یا سافتبال، پرتاب کننده توپ (پیچر) باید از تخته تپه، پرتاب کنه. تو بسکتبال، توپ باید از حلقه رد بشه و تو راه رفتن، معمولا از اجراگر خواسته میشه که بدون کمک راه بره.
محیط: محدودیت محیطی، همونطور که از اسمش پیداست، خارج از کار اجراگر هستن و از مکان یا محیطی که حرکت توش اجرا میشه میاد. محدودیت محیطی شامل فاکتور های واضحی مثل سطوح، نور، دما، اکوستیک و همچنین شامل حضور یا غیاب دیگر بازیکن ها و تماشاچیها یا حتا موقعیت های استراتژیک درون یه بازی میشن. محدودیت های محیطی حیاتی هستن اما غالبا نادیده گرفته میشن و شامل ابعاد (طول، عرض، ارتفاع) انتخاب شده، تنظیم نشده فضای اجرا و وسایل استفاده شده (ابعاد و جرم وسیله و هدف) میشن.
فرد: محدودیت فردی، درون اجراگر هستن، و منعکس کننده صفات سیستم عصبی-ماهیچه ای-اسکلتی اجراگر هستن. محدودیت های فردی یا ساختاری هستن یا کاربردی:
محدودیت های ساختاری با ابعاد اجراگر مشخص میشن و شامل وزن بدن، طول بخش ها و جرم بدن میشن. یه وضعیت بدنی مثل فلجی، از دست دادن اندام یا بیماری مفصلی هم یه محدودیت فردی رو تحمیل میکنه.
محدودیت کاربردی با وضعیت توسعه ای یه فرد مشخص میشه. محدودیت های کاربردی میتونه فیزیولوژیکی (مثل قدرت، استقامت قلبی عروقی ، ترکیب بدن وانعطاف پذیری)، شناختی (توسعه ذهنی، تجربه) یا روانشنختی (ظرفیت ادراک [مخصوصا دیدن، شنیدن و حس کردن]، سطوح انگیزه، اعتماد به نفس، ترس، توجه و اضطراب) باشه.
تعامل محدودیت های کار، محیط و فرد مشخص میکنه که اجراگر، برای حرکت مورد انتظار در محل مشخص "مناسب" هست یا نه. محدودیت های فردی، حدودی رو به چیزایی که اجراگر میتونه انجام بده، تحمیل میکنه و اینها با محدودیت های کار و محیط، تعامل میکنن تا شانس موفقیت رو حین اجرا تحت تاثیر قرار بدن. محدودیت های ساختاری و کاربردی، جوری که فرد، کار داده شده در محیط مشخص رو اجرا میکنه، محدود میکنن.
اگه یه محدودیت به عنوان جلوگیری کننده از نایل شدن هدف، شناخته بشه، یه راه خوب برای بهبود اجرا اینه که یه سازگاری یا سازگاریهایی رو برای ایجاد یه تناسب بهتر بین کار، محیط و فرد، درست کرد. محدودیت های کار با سازگار کردن قوانین برطرف میشن. محدودیت های محیطی با سازگاری ساختار فیزیکی برطرف میشه. و محدودیت های فردی با سازگاری فرد، برطرف میشه.
این سازگاری های ممکن رو بعدا در بخش "تداخل برای بهبود اجرا" بازبینی میکنم.
خطاهای تکنیکی
یه خطای تکنیکی سبب شکست دستیابی به هدف استراتژیک میشه. یه دونده ممکنه کند باشه، یه کوارتربک (اصلیترین بازیکن فوتبال آمریکایی) ممکنه هدف رو از دست بده یا یه بلاکر در والیبال ممکنه با تور تماس پیدا کنه.
یه خطای تکنیکی واسه این رخ میده که نیروی ماهیچه ای تولیدی توسط اجراگر، سرعت های زاویه ای بخش های لازم برای تولید تکانه بهینه روی بدنی که باید حرکت کنه رو تولید نکرده. آسونترین راه برای دیدن اینکه چی سبب ایجاد خطی تکنیکی میشه، توضیح دادن یه تکنیک خوبه، روند استفاده از چرخش مفصل برای تولید یه تکانه خارجی.
توصیف تکنیک خوب
اجرای موفق به اعمال تکانه بهینه در جهت درست بستگی داره. نیروی اعمالی بوسیله ماهیچه در طول مفصل، حرکت های زاویه ای بخش رو درست میکنه. حرکت های زاویه ای بخش برای به کار بردن یه نیروی خارجی برای یه دوره زمانی روی بدنی که باید حرکت داده بشه، استفاده میشه. ماهیچه ها باید حرکت های زاویه ای بخش رو تولید کنن تا یه تکانه خارجی تولید بشه که مقدارش درسته و در بازه زمانی بهینه ای و در جهت درستی اعمال میشه تا ممانمرد نظر رو بگیره و به هدف استراتژیک دست پیدا کنه.
چرخه کشش-کوتاهی (فصل ۱۵ رو ببینید) کلید تولید نیروی ماهیچه ای حین حرکته. تولید نیروی ماهیچه ای بهینه با استفاده از چرخه کشش-کوتاهی میاد. درازشدگی فعال یا کشش یه ماهیچه بلافاصله قبل از کوتاه شدنش، حین یه حرکت، به اجراگر اجازه میده تا از هردو تنش فعال و غیر فعال برای تولید چرخش های زاویه ای بخشی استفاده کنه.
چون ماهیچه در بهترین حالت، نیرو رو با چرخه کشش-کوتاهی تولد میکنه، مهمه که یه اجراگر از چرخه کشش-کوتاهی، حین حرکت استفاده کنه.
تقسیم بندی اجرای حرکت به مراحل
اجرای ماهرانه تقریبا هر نوع حرکتی، شامل سه مرحله مکانیکی آماده سازی، اجرا و دنبال کردن میشه. این سه مرحله و چگونگی ربطشون به چرخه کشش-کوتاهی رو در این بخش توضیح میدم.
مرحله آماده سازی
در مرحله آماده سازی (که گاهی مرحله شروع، مرحله حرکت خلاف یا مرحله پیش-کشش نامیده میشه)، بخش ها به صورت پی در پی در جهت عکس حرکتی که میخوان برن و هنگام تولید تکانه خارجی میچرخن.
هرکدوم از بخش ها در سکانسی به سمت عقب که با بخش های بزرگتر نزدیک به تنه (بخش های پراکسیمال) شروع میشن و با بخش های کوچکتر دورتر از تنه (بخش های دیستال) ادامه پیدا میکنن، حرکت میکنن.
با چرخش بخشها در جهت برعکس، ماهیچه های رد شده از روی مفصل در سمت مخالف دراز میشن (کش میان) و با رفلکس کششی به صورت اکسنتریکی فعال میشن تا چرخش زاویه ای به سمت عقب بخش هارو کند و متوقف کنه (فصل ۱ رو ببینید). درازشدگی، تنش غیرفعال ی رو در بخش های الاستیکی ماهیچه ذخیره میکنه و سطح بالایی از تنش فعال رو در بخش انقباضی ایجاد میکنه. (بخش های الاستیکی و انقباضی ماهیچه، در فصل ۱ توضیح داده شدن). حین مرحله آماده سازی، سطح بالای نیروی ماهیچه ای فعال و غیر فعال، در ماهیچه های درازشونده گسترش پیدا میکنه.
مرحله آماده سازی، ماهیچه رو دراز میکنه و برای تولید نیروی ماهیچه ای برای شتاب دادن به بخش های بدن، حین حرکت، آماده میکنه. مرحله آماده سازی، بخش "کشش" چرخه کشش-کوتاهی ه.
مرحله اجرا
تو مرحله اجرا که گاهی بهش مرحله پیشران یا مرحله شتاب هم میگن، تک بخش های بدن، در جهتی به برای تولید تکانه خارجی روی بدن لازمه، میچرخن. بخش های حین مرحله اجرا به سمت "جلو" حرکت میکنن و بخش دیستال میکشه یا میفشاره تا یه تکانه خارجی رو تولید کنه.
مرحله اجرا وقتیه که ماهیچه ها از نیروی ماهیچه ای فعال و غیرفعال، که حین مرحله آماده سازی، بهینه شده، برای شتابدهی به بخش های بدن و برای اعمال تکانه خارجی برای دستیابی به هدف استراتژیک یه حرکت استفاده میکنن. مرحله اجرا، بخش "کوتاه شده" چرخه کشش-کوتاهیه.
ماهیچه هایی که قبلا حین مرحله فعالسازی، کشیده و فعال شدن، حین مرحله اجرا کوتاه میشن و نیروهای ماهیچه ای فعال و غیر فعال رو روی روی بخش ها وارد میکنن. نیروی ماهیچه ای حرکت زاویه ای بخش ها رو شتاب میده و به اونا سرعت میبخشه. هر چی یه بخش سریعتر بچرخه، بخش دیستال نیروی بزرگتری رو روی بدن اعمال میکنه. همچنین، چون بخش ها، قبل از کوتاهی به عقب حرکت کرده بودن، بخش ها حین مرحله اجرا، نیروی بزرگتر و برای زمان طولانیتر اعمال میکنن. مقدار بیشتر نیرو و زمان طولانیتر اعمال نیتو، مقدار تکانه خارجی اعمالی رو زیاد و سبب تغییر بزرگتری در مومنتوم بدن میشه.
نیروی ماهیچه تکانه ای رو به بخش ها اعمال میکنه تا سبب چرخش اونها بشه. اگه بخش دیستال با یه بدن دیگه تماس پیدا کنه یا در حال تماس باشه، حرکت زاویه ای بخش ها به بخش دیستال اجازه میدن تا یه تکانه رو به اون بدن اعمال کنه. در حرکت، بدن دیگر هامون زمین ه؛ تکانه اعمالی زمین، روی اجراگر، سبب تغییر در حرکت کل بدن اجراگر میشه. در فعالیت های پرتابی و ضربه ای، اون یکی بدن، شی ه که پرتاب شده یا ضربه خورده ست و تکانه اعمالی توسط اجراگر روی بدن پرتابی یا ضربه خورده، حرکت اون بدن رو تغییر میده.
مرحل دنبال کردن
حین مرحله دنبال کردن (که گاهی مرحله ترمز گیری هم نامیده میشه)، بخش های بدن به چرخش در جهت مرحله اجرا ادامه میدن، اما بخش ها کند میشن و نهایتا می ایستند، بسته به جهت و سرعت حرکت زاویه ای، یا فعالیت ماهیچه ای اکسنتریک یا جاذبه، نیروی کند کننده رو فراهم و چرخش بخش ها رو متوقف میکنه.
با اینکه ازش به عنوان یه کلید برای اجرای خوب یاد میشه، مرحله دنبال کردن مستقیما تکانه اعمالی روی بدن رو تحت تاثیر قرار نمیده. اگه بخش ها در آخر مرحله اجرا، سریع بچرخن، به چرخش شون ادامه میدن یا متوقف بشن و مرحله دنبال کردن مشهوده. اگه بخش ها در آخر مرحله اجرا، سریع حرکت نکنن، اجراگر، مرحله دنبال کردن کمی نشون میده یا اصلا نشون نمیده. اینکه از اجراگر خواسته بشه که "دنبال کنه" بدون اینکه چگونگی استفاده از مراحل آماده سازی و اجرا، برای چرخوندن سریع بخش ها رو براش توضیح بدیم، کمکی نمیکنه. دنبال کردن یه نشونه اجرای خوبه و دلیل اجرای خوب نیست.
ورود به بخش های مکانیکی
تکانه خارجی تولیدی در بخش دیستال، بیانگر جمع اثرات همه چرخش های مفصلی استفاده شده توسط اجراگر و ترتیب دهی موثر بخش های نزدیک-به-دور (بزرگتر به کوچکتر) گنجانده شده، ست.
برای حرکت موثر، همه بخش های گنجانده شده در حرکت، باید سه مرحله مکانیکی رو پشت سر بگذارند. این بخش ها در واقع در میان مفصل درگیر در حرکت همپوشانی میکنن. وقتی یه مفصل در مرحله دنبال کردن ه، مفصل دیگه میتونن در مرحله اجرا یا هنوز در مرحله آماده سازی باشند.
این ترتیب دهی مراحل، به سه جنبه حیاتی چرخش های بخش یا مفصل ختم میشن که برای عیب یابی اجرا باید بهشون توجه کرد.
جمع نیروهای مفصلی: هر مفصل چرخنده، در تکانه خارجی مشارکت میکنه. هر چی بخش های بیشتری حین اجرا بچرخن، تکانه اعمالی بزرگتری توسط بخش دیستال تولید میشه. متقابلا برای ایجاد یه تکانه اعمالی بزرگتر، یج اجراگر میتونه از مفصل اضافی در اجرا استفاده بکنه. عدم استفاده از همه مفصل ممکن، دلیل یه خطای تکنیکیه چون این سبب تکانه اعمالی کوچکتر توسط بخش دیستال ه.
استمرار نیروهای مفصلی: ترتیب دهی چرخش های بخش ها باید با بخش های بزرگتر و نزدیک تر شروع بشه و متعاقبا به بخش های کوچکتر و دورتر جریان پیدا کنه. همپوشانی اعمال مفصلی از نزدیک به دور باید نرم و ادامه دار و بدون هیچ درنگ و مکثی حین مراحل آماده سازی و اجرا باشه. عدم استفاده از اعمال مفصلی نرم و ادامه دار از بخش های بزرگتر و نزدیکتر به بخش های کوچکتر و دورتر، دلیل ایجاد یه خطی تکنیکه چون هر مکثی سبب ایجاد یه تکانه اعمالی کوچکتر توسط بخش دورتر میشه.
همپوشانی ترتیب دهی نزدیک-به-دور چرخش های بخش ها، یعنی مرحله اجرای یه بخش نزدیک اول رخ میده و در مرحله آماده سازی بخش دورتر مجاور مشارکت میکنه. اساسا همونطور که بخش نزدیک، حین مرحله اجرا ش، شروع به چرخش میکنه، بخش دورتر به چرخش در جهت مخالف، به دلیل اینرسی، ادامه میده. جهت مخالف حرکت دو بخش، کشیدگی ماهیچه هاو که از مفصل، در جایی که دو بخش به هم میرسن، رد میش رو زیاد میکنه. این مفیده چون ماهیچه کشیده شده، بخش دورتر رو حین مرحله اجرا میکشه.
جهت تکانه: چرخش های بخش ها باید یه ضربه خارجی رو تولید کنه که در جهت مومنتوم مورد نظر بدن اعمال میشه. در حرکت، فشار پا باید در خلاف جهت حرکت باشه. در فعالیت های پرتابی یا ضربه ای، فشار روی شی پرتابی یا ضربه زده شده، باید در جهت مورد نظر سفر باشه.
ضربه خارجی تولیدی در بخش دور نشانگر جمع اثر همه چرخش های مفصلی که توسط اجراگر استفاده شده و ترتیب دهی موثر نزدیک-به-دور بخش های گنجانده شده، ست.
پیچینگ با مراحل
مراحل آماده سازی، اجرا و دنبال کردن (شکست اجرای حرکت به بخش ها را در ابتدای این فصل ببینید) معمولا در همه حرکتی که بهینه اجرا میشن، وجود دارن. تو این بخش، این سه مرحله رو با پیچینگ بیسبال که فعالیتیه که این مراحل توش کاملا واضحه نشون میدم و بعدش چندتا خطی تکنیکی معمول رو توضیح میدم.
اگه همه استراتژی ظریف بازی رو نادیده بگیریم، هدف استراتژیک یه پیچ در بیسبال اینه که پیتچر توپ رو جوری بندازه که بتر نتونه بهش با موفقیت ضربه بزنه. هدف مکانیکی یه پیچ اینه که پیچر بتونه با دستش (بخش دور بازو ش) ضربه ای به توپ بزنه. ضربه اعمالی به توپ مومنتومی میده که اگه خوش شانس باشه به هدف مورد نظر پیچر میره. ضربه اعمالی به توپ از جمع ادامه دار اعمال مفصلی استفاده شده توسط پیچر حین مراحل اجرای پرتاب میاد.
بهره برداری از همه مراحل
شکل ۳-۱۶ تصاویری ویدیوئی از اجری یک فرد باتجربه که پیچ بیسبال رو میندازه رو نشون میده. من بازوی سایه خورده رو "بازوی پرتاب کننده"، پای سایه خورده رو "پای push-off" و پای سایه نخورده رو "پای رهبر" مینامم. مراحل هر مفصل زیر هر تصویر مشخص شده.
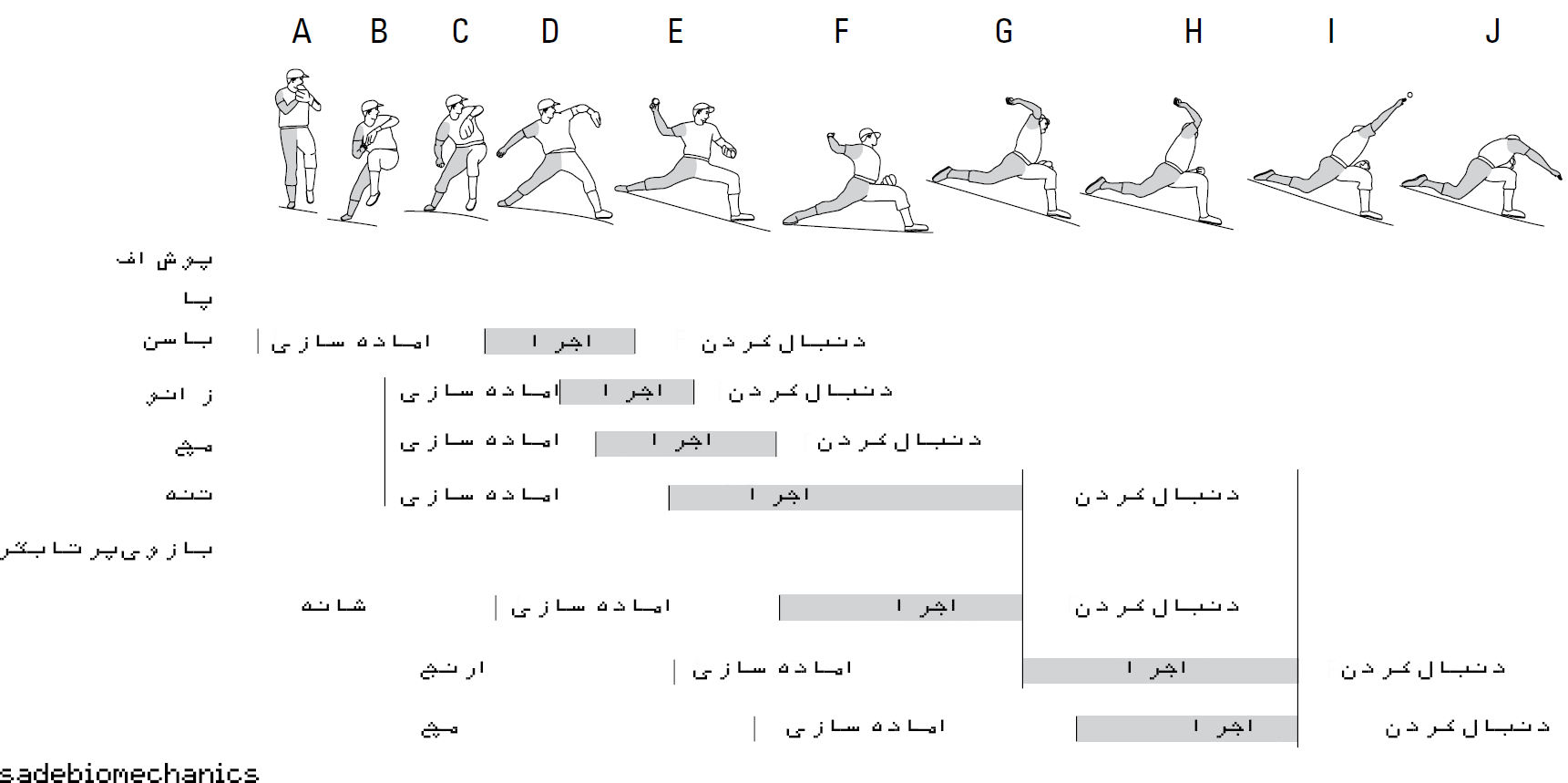
شکل ۳-۱۶: مراحل مکانیکی حین حرکت پرتابی موفق.
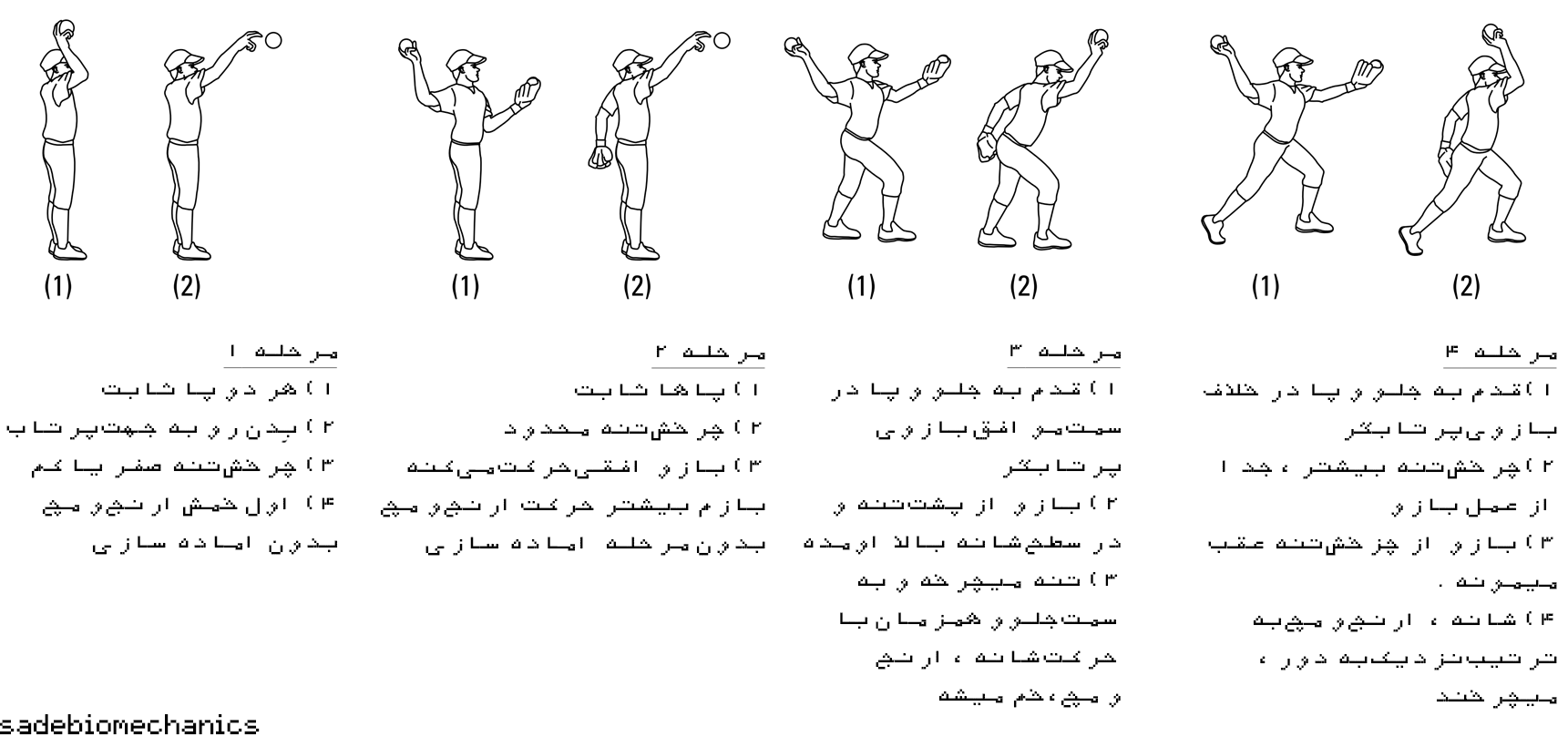
شکل ۴-۱۶: مراحل گسترش حرکت پرتاب
